2019 Spaceport America Cup
As a member of SNU rocket team HANARO, I participated in the 2019 Spaceport America Cup, 10K feet with Commercial of the Shelf solid motor.
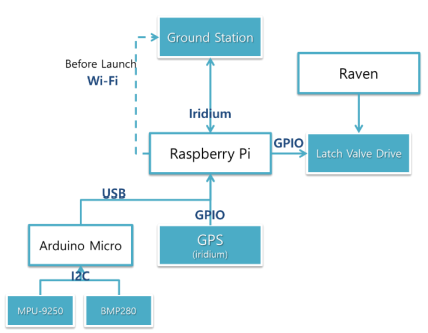
I was part of avionics system development. Our system consists of Raspberry Pi as the main MCU and Arduino as the sensor controller.
Arduino acquires data from IMU and barometer and sends them to Raspberry Pi via USB serial communication.
Raspberry Pi analyses data from Arduino and Iridium GPS. It communicates with the ground station via Wi-Fi or Iridium satellite communication. Also, it controls the parachute deploy module.
I mainly worked for sensor data processing. I worked on codes for sensor data acquisition from Arduino and its communication with Raspberry Pi.
In Raspberry Pi, I implemented EKF for the sensor fusion algorithm. This processed position estimation is used for parachute deployment condition check.
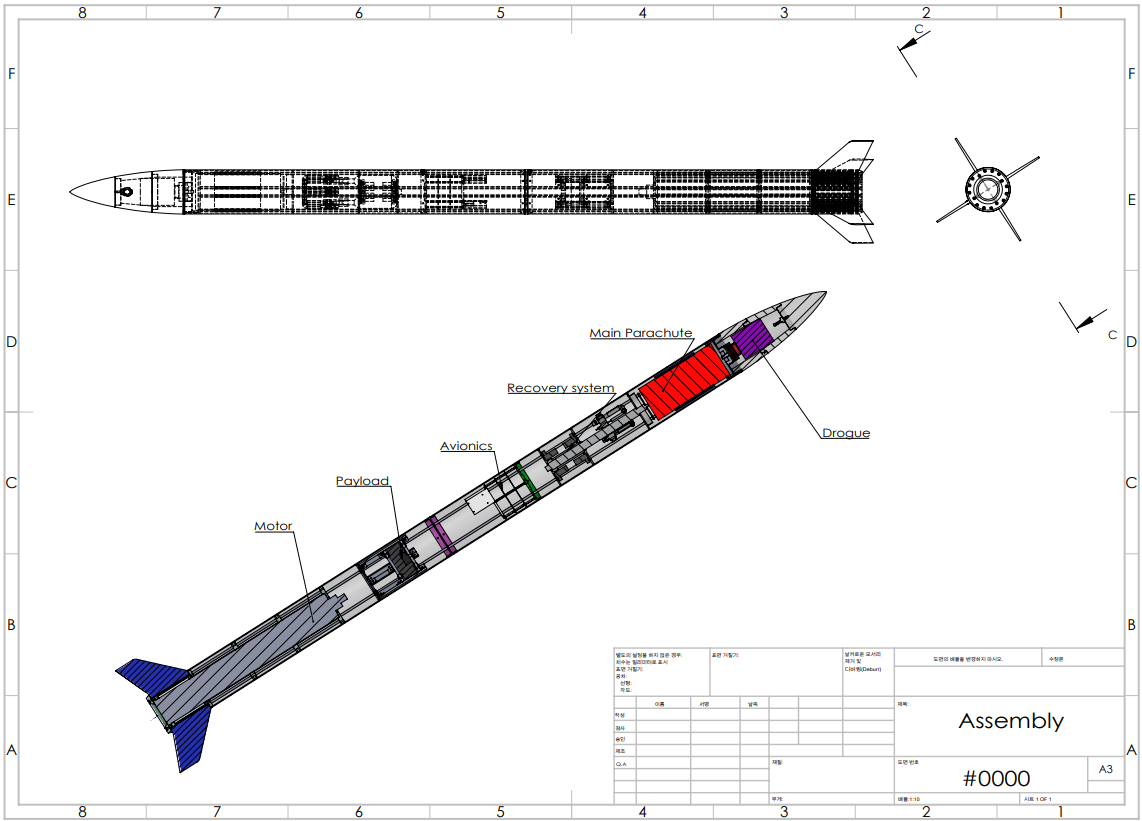
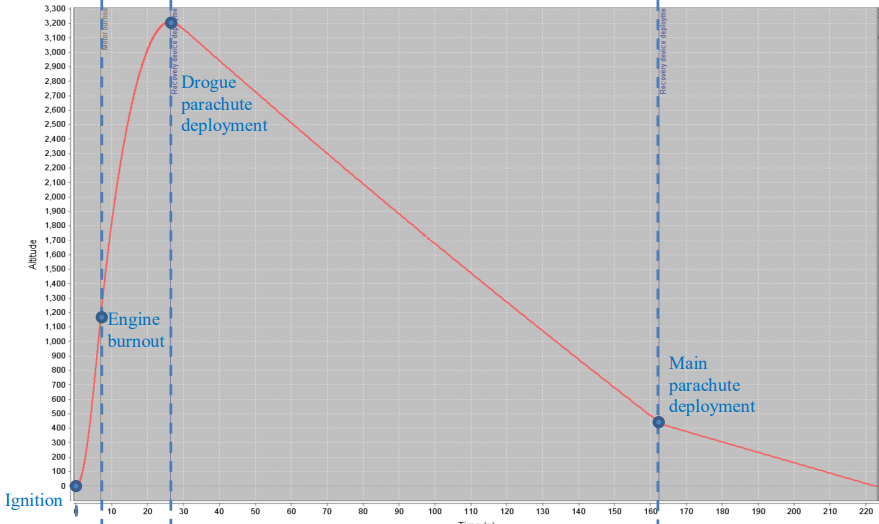
We implemented a drogue-main parachute system to prevent the rocket landing too far away from the launch site.
If Raspberry Pi thinks the rocket’s altitude is decreasing, it deploys a drogue parachute. After descending, in the 500m altitude, the avionics system deploys the main parachute.
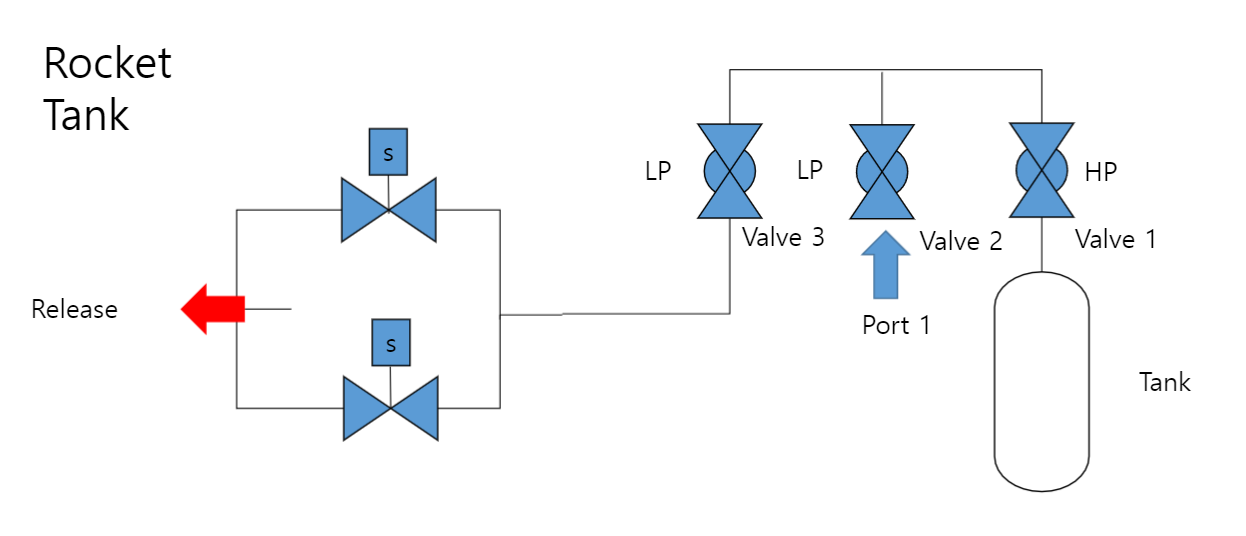
Our recovery system is actuated with compressed air. Due to safety regulations in Korea, we could not use black powder as American teams. Therefore, if a parachute signal is given, Raspberry Pi provides current to latch valve and release air deploys parachutes.
We successfully deployed the parachute and retrieved the rocket with this avionics module.