
Performance Comparison between EKF and UKF in GPS/INS Low observability Conditions
Kyunghyun Ryu, Jiseock Kang, Dongjun Lee
2021 The 21th International Conference on Control, Automation, and Systems.
Abstract: For the UAV localization problem, GPS-IMU-based sensor fusion is widely used. In such combination, GPS could correct IMU drift error and IMU could compensate for a low sampling rate of GPS. However, it is known that the GPS-IMU system becomes unobservable for a certain type of maneuver, e.g. hovering as the simplest instance. This paper presents a comparison of two variations of Kalman filter, extended Kalman filter (EKF) and unscented Kalman filter (UKF) for unmanned aerial vehicle (UAV) localization problem in such low observability maneuver. Observability
analysis and simulation are conducted on various maneuvers including constant attitude motions and orbit motion. This comparison could help the localization algorithm decision in the development of the UAV system.
Full paper
Background
Unobservability
In GPS-INS navigation, some states of the system might not be observable depending on the motion. For instance, if the vehicle does not experience any movement, the vehicle’s gyro bias in the yaw direction becomes unobservable.
EKF and UKF
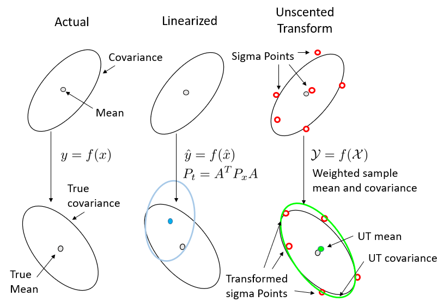
For the non-linear systems, the Kalman filter has many variations. The standard approach is the extended Kalman filter (EKF). In the EKF, one linearizes the given system and applies a Kalman filter. On the contrary, in the unscented Kalman filter (UKF), one takes sigma points, applies an unscented transform, and then applies a Kalman filter. UKF is known to have superior performance than EKF.
Contribution
We analyzed observability in several UAV motions, mainly constant attitude motions. For a detailed description, please refer to the attached paper. Then, we compared the state estimation performance of EKF and UKF in such low observability motions.
Conclusion
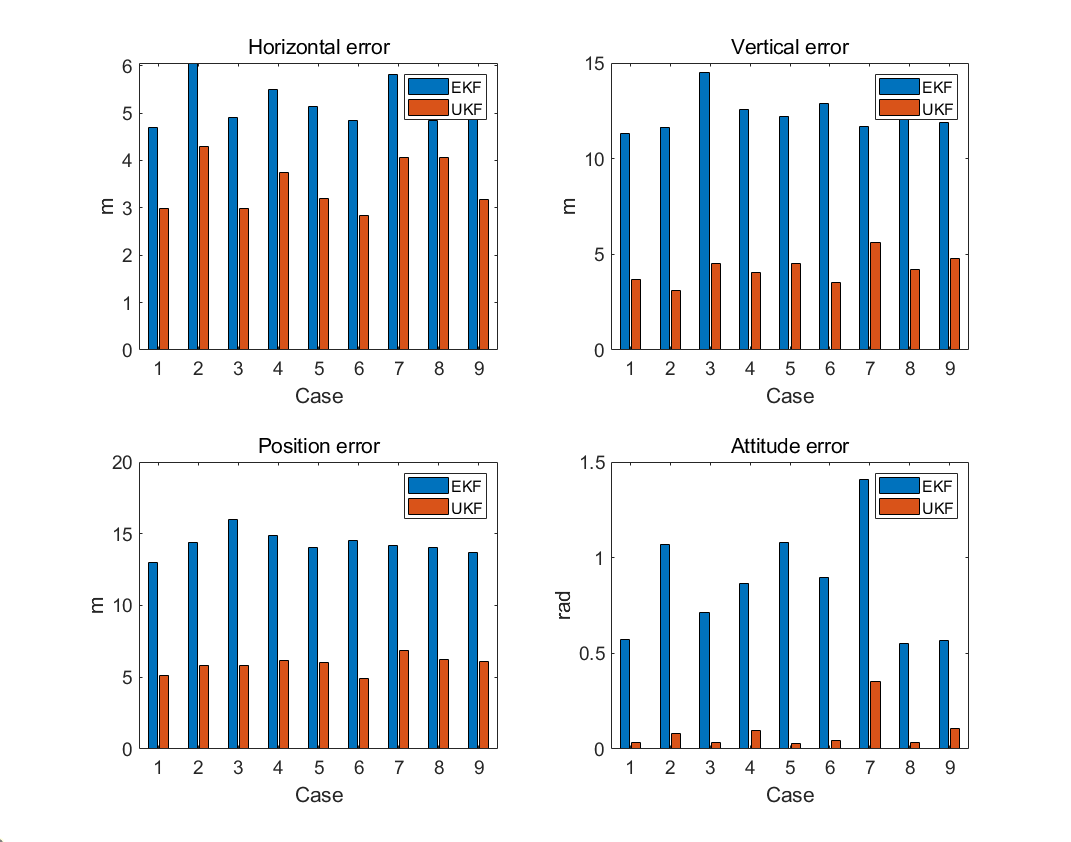
In the result of MATLAB simulation, we could see a more significant performance gap in vertical position estimation than horizontal error. In addition, we could observe a significant performance gap in attitude estimation. We could suspect this is a result of an unobservable attitude in simulated motions.
Please refer to our paper for further details